Training#
The prebuilt models will always be improved by adding data from the target area. In our work, we have found that even an hour’s worth of carefully chosen hand-annotation can yield enormous improvements in accuracy and precision. 5-10 epochs of fine-tuning with the prebuilt model are often adequate at a low learning rate.
Consider an annotations.csv file in the following format
testfile_deepforest.csv
image_path, xmin, ymin, xmax, ymax, label
OSBS_029.jpg,256,99,288,140,Tree
OSBS_029.jpg,166,253,225,304,Tree
OSBS_029.jpg,365,2,400,27,Tree
OSBS_029.jpg,312,13,349,47,Tree
OSBS_029.jpg,365,21,400,70,Tree
OSBS_029.jpg,278,1,312,37,Tree
OSBS_029.jpg,364,204,400,246,Tree
OSBS_029.jpg,90,117,121,145,Tree
OSBS_029.jpg,115,109,150,152,Tree
OSBS_029.jpg,161,155,199,191,Tree
The config file specifies the path to the CSV file that we want to use when training. The images are located in the working directory by default, and a user can provide a path to a different image directory.
import os
from deepforest import main
from deepforest import get_data
# Example run with short training
annotations_file = get_data("testfile_deepforest.csv")
# Load the default model
m = main.deepforest()
m.config.train.epochs = 1
m.config.train.csv_file = annotations_file
m.config.train.root_dir = os.path.dirname(annotations_file)
m.create_trainer()
For debugging, its often useful to use the fast_dev_run = True from pytorch lightning
m.config.train.fast_dev_run = True
See config for full set of available arguments. You can also pass any additional pytorch lightning argument to trainer.
To begin training, we create a pytorch-lightning trainer and call trainer.fit on the model object directly on itself. While this might look a touch awkward, it is useful for exposing the pytorch lightning functionality.
m.trainer.fit(model)
For more, see Google colab demo on model training
Fine-tuning vs from-scratch training#
Depending on your task, you might want to fine-tune an existing DeepForest model. This is probably the case if you want to detect trees in a region where the default model performs poorly. If your detection task is very different, like detecting wildlife or non-aerial images then you may wish to train “from scratch”. Within DeepForest, this means starting from a generic pretrained model, typically trained on a large dataset like MS-COCO (and usually, on Imagenet as well). This is almost always more efficient than truly training from random weights.
To specify that you don’t want to use a prebuilt model, set model.name = None. For example:
m = main.deepforest(config_args{"num_classes": 3,
"label_dict": {
"Tree": 0,
"Bird": 1,
"Animal": 2
}
"model":{"name":None}})
which will create an initialized RetinaNet model with 3 classes, ready for training. You must always specify your class count and label map.
Custom datasets with other classes#
If you need to re-train a “tree” detection model to work in your specific survey area or ecosystem, you don’t need to do anything. Models themselves have no understanding of the label “tree”, they output predictions corresponding to numerical class IDs (starting at 0). By default, the label_dict in the config is populated when the model is pulled from the hub (or a local checkpoint), which is { Tree: 0 }.
However, if you want to train on multiple classes or detect something that isn’t a tree (for example we host a model for multiple Everglades bird species), you need to specify:
The number of classes you want to train on (this may be 1, unchanged)
The label_dict that specifies what your classes are called.
For example:
config_args = {
"num_classes": 2,
"label_dict": {
"Alive": 0,
"Dead": 1
}
}
m = main.deepforest(config_args=config_args)
Under the hood, the following steps are taken:
DeepForest loads a model from a checkpoint (for fine-tuning), or it initializes a model ready for training.
The model initialization code compares the label_dict in the config to the model.
If the config is empty, or it matches the model checkpoint, the checkpoint label_dict is used.
If your label dict differs (e.g. you set
{"Bird": 0}and specify aTreecheckpoint) then the model will be modified to reflect the new class list. At this point your model is technically unmodified, but the assumption is that you will re-train it.If the class count differs, then the model is modified with the desired number of classes (and it will not provide good predictions until re-trained).
If you modify the defaulf configuration, we assume that you intend to train on your own data, and we will respect your overrides.
Disable the progress bar#
If you want to disable the progress bar while training change the create_trainer call to:
from deepforest import model
model.create_trainer(enable_progress_bar=False)
Loggers#
DeepForest logs the training loss, validation loss and class metrics (for multi-class models) during each epoch. To view the training curves, we highly recommend using a pytorch-lightning logger, this is the proper way of handling the many outputs during training. See pytorch-lightning docs for all available loggers.
from deepforest import main
m = main.deepforest()
logger = <any supported pytorch lightning logger>
m.create_trainer(logger=logger)
Video walkthrough of colab#
Reducing tile size#
High resolution tiles may exceed GPU or CPU memory during training, especially when many target objecrts are present. To reduce the size of each tile, use preprocess.split_raster to divide the original tile into smaller pieces and create a corresponding annotations file.
For example, this sample data raster has size 2472, 2299 pixels.
"""Split raster into crops with overlaps to maintain all annotations"""
raster = get_data("2019_YELL_2_528000_4978000_image_crop2.png")
import rasterio
src = rasterio.open(raster)
/Users/benweinstein/.conda/envs/DeepForest/lib/python3.9/site-packages/rasterio/__init__.py:220: NotGeoreferencedWarning: Dataset has no geotransform, gcps, or rpcs. The identity matrix be returned.
s = DatasetReader(path, driver=driver, sharing=sharing, **kwargs)
src.read().shape
(3, 2472, 2299)
With 574 trees annotations
from deepforest import utilities
from deepforest import get_data
annotations = utilities.read_pascal_voc(get_data("2019_YELL_2_528000_4978000_image_crop2.xml"))
annotations.shape
(574, 6)
import tempfile
from deepforest import preprocess
#Write csv to file and crop
tmpdir = tempfile.gettempdir()
annotations.to_csv("{}/example.csv".format(tmpdir), index=False)
annotations_file = preprocess.split_raster(path_to_raster=raster,
annotations_file="{}/example.csv".format(tmpdir),
base_dir=tmpdir,
patch_size=500,
patch_overlap=0.25)
# Returns a 6 column pandas array
assert annotations_file.shape[1] == 6
Now we have crops and annotations in 500 px patches for training.
Negative samples#
To include images with no annotations from the target classes create a dummy row specifying the image_path, but set all bounding boxes to 0
image_path, xmin, ymin, xmax, ymax, label
myimage.png, 0,0,0,0,"Tree"
Excessive use of negative samples may have a negative impact on model performance, but when used sparingly, they can increase precision.
Model checkpoints#
Model checkpoints are the output of training. They represent the learned weights that can be distributed and used by anyone with DeepForest installed to perform prediction or fine-tuning. There are two main types of checkpoint that we work with:
Lightning checkpoints: these contain a full snapshot of the training state of the model and can be used to resume or continue training. These are accesseed via the
save_checkpointandload_from_checkpointfunctions on amain.deepforestobject. You can also passconfigandconfig_argstoload_from_checkpointto modify the training conditions (such as training for more epochs). This is a single.ckptfile.Hugging Face Hub checkpoints: these are the preferred way to distribute your model once you’re happy, and this is what is set in the config as the model name. These checkpoints contain minimial information required to load a model - the weights and a config file that tells the code how to construct the architecture (such as number of classes or other options). You call
save_pretrainedandload_pretrainedon the model object (e.g.main.deepforest.model). This is a folder with a.safetensorsweight file, and a JSON config.
Pytorch lightning allows you to save a model at the end of each epoch. By default this behavior is turned off since it slows down training and quickly fills up storage. To restore model checkpointing:
from pytorch_lightning.callbacks import ModelCheckpoint
from pytorch_lightning.loggers import TensorBoardLogger
callback = ModelCheckpoint(dirpath='temp/dir',
monitor='box_recall',
mode="max",
save_top_k=3,
filename="box_recall-{epoch:02d}-{box_recall:.2f}")
model.create_trainer(logger=TensorBoardLogger(save_dir='logdir/'),
callbacks=[callback])
model.trainer.fit(model)
Saving and loading models#
To save a model ready to push to HuggingFace Hub, you can use save_pretrained with any of the options documented here. This is the preferred way to “export” your models for later use.
m = main.deepforest()
m.load_model("weecology/deepforest-tree")
# ... do some training
# Note this is called on the model instance
m.model.save_pretrained("local_path/to/your/checkpoint", push_to_hub=True, repo_id="your_repo")
Then you can reload this model later
m = main.deepforest()
m.load_model("local_path/to/your/checkpoint") # or pass "username/your_repo"
# or
m = main.deepforest(config_args={'model': {'name': "username/your_repo"}})
Other settings like the score threshold, etc are taken from the config file or config_args as usual.
If you want to load a checkpoint that was saved during training (or if you manually called save_checkpoint), then just call load_from_checkpoint. Note that config.model.name must point to a HuggingFace format checkpoint, it cannot point to a Lightning checkpoint.
import tempfile
import pandas as pd
from deepforest import main
tmpdir = tempfile.TemporaryDirectory()
# Create a deepforest model and load the latest release
m = main.deepforest()
m.load_model("weecology/deepforest-tree")
#save the prediction dataframe after training and compare with prediction after reload checkpoint
img_path = get_data("OSBS_029.png")
model.create_trainer()
model.trainer.fit(model)
pred_after_train = model.predict_image(path = img_path)
#Save a checkpoint via the trainer
model.trainer.save_checkpoint("{}/checkpoint.pl".format(tmpdir))
#reload the checkpoint to model object
after = main.deepforest.load_from_checkpoint("{}/checkpoint.pl".format(tmpdir))
pred_after_reload = after.predict_image(path = img_path)
assert not pred_after_train.empty
assert not pred_after_reload.empty
pd.testing.assert_frame_equal(pred_after_train,pred_after_reload)
Note that when reloading models via load_from_checkpoint, you should carefully inspect the model parameters, such as the score_thresh and nms_thresh. These parameters are updated during model creation and the config file is not read when loading from checkpoint!
It is best to be direct to specify after loading checkpoint. If you want to save hyperparameters, edit the deepforest_config.yml directly. This will allow the hyperparameters to be reloaded on deepforest.save_model().
after.model.score_thresh = 0.3
Some users have reported a pytorch lightning module error on save.
In this case, just saving the torch model is an easy fix.
torch.save(model.model.state_dict(),model_path)
and restore
model = main.deepforest()
model.model.load_state_dict(torch.load(model_path))
Note that if you trained on GPU and restore on cpu, you will need the map_location argument in torch.load.
Data Augmentations#
DeepForest supports configurable data augmentations using Kornia to improve model generalization across different sensors and acquisition conditions. Augmentations can be specified through the configuration file or passed directly to the model.
Configuration-based Augmentations#
The easiest way to specify augmentations is through the config file:
train:
# Simple list of augmentation names
augmentations: ["HorizontalFlip", "RandomResizedCrop"]
# Or as a list of custom parameters
augmentations:
- HorizontalFlip: {p: 0.5}
- RandomResizedCrop: {size: [400, 400], scale: [0.5, 1.0], p: 0.3}
- PadIfNeeded: {size: [512, 512], p: 1.0}
Note that augmentations are provided as a list (prepended with a - in YAML). If you omit this, the parameter will be interpreted as a dictionary and the config parser may fail. If you provide only the augmentation name, default settings will be used. These have been chosen to reflect sensible parameters for different transformations, as it’s quite easy to “over augment” which can make models harder to train. By default, if you enable augmentation and do not specify a transform explicitly, only HorizontalFlip will be used.
You can also specify augmentations programmatically:
from deepforest import main
# Using config_args
config_args = {
"train": {
"augmentations": ["HorizontalFlip", "RandomBrightnessContrast"]
}
}
model = main.deepforest(config_args=config_args)
# Or with parameters
config_args = {
"train": {
"augmentations": [
"HorizontalFlip": {"p": 0.8},
]
}
}
model = main.deepforest(config_args=config_args)
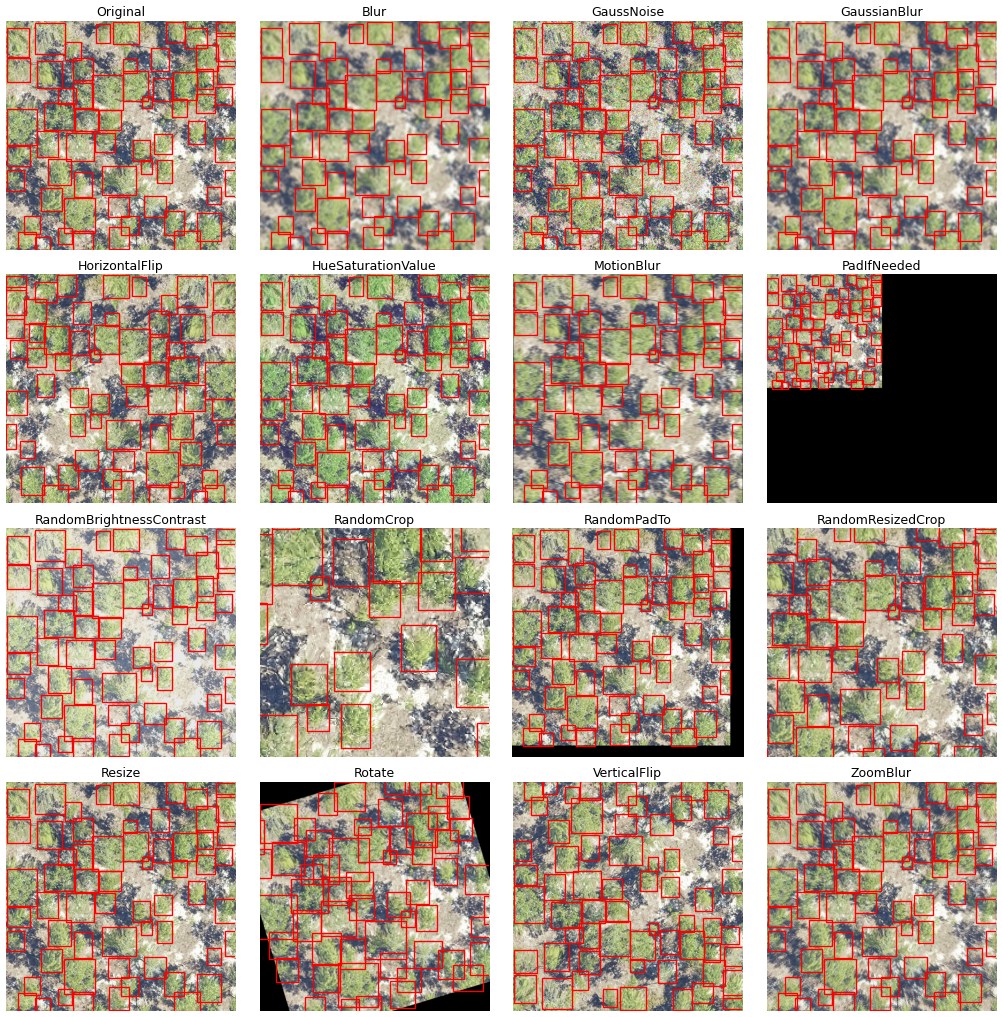
Available Augmentations#
DeepForest supports the following augmentations optimized for object detection, which you can specify via a single keyword:
HorizontalFlip: Randomly flip images horizontally
VerticalFlip: Randomly flip images vertically
Resize: Resize images while maintaining aspect ratio
RandomCrop: Extract random crops from images
RandomResizedCrop: Crop image at random location and resize while preserving bounding boxes
PadIfNeeded: Pad images to minimum size
RandomPadTo: add random padding to the image
Rotate: Rotate images by small angles
RandomBrightnessContrast: Adjust brightness and contrast
HueSaturationValue: Adjust color properties
GaussNoise: Add gaussian noise
Blur: Apply box blur effect
GaussianBlur: Apply gaussian blur effect
MotionBlur: Apply motion blur effect
ZoomBlur: Apply zoom blur effect (similar to radial motion blur in GIMP).
Other kornia transforms are also supported in principle, but the above should cover most use-cases for aerial object detection.
Zoom Augmentations for Multi-Resolution Training#
For improved generalization across different image resolutions and scales, you can configure transformations that will generate training samples with “zoomed” imagery.
The simplest way to achieve this is to perform a random resize. If the image is purely rescaled with no change in bounds, this is equivalent to an image with a different ground sample distance. A 1024 px image covering 100 m is around 10 cm/px, if rescaled to 512 px, the image is now 20 cm/px. Since this may perform an upscale, we tend to want to crop the augmented image as well (or pad). Kornia provides this in one operation via RandomResizedCrop which takes a crop of the image and then resizes to a target, with padding if needed; this is effectively the same thing.
RandomResizedCrop can only zoom “in” to an image, that is the scale parameter is ineffective above 1.0. We provide a random version of PadTo, RandomPadTo which will add a user-defined amount of padding to an image, effectively zooming out before the crop is acquired.
You will likely need to experiment to find the best augmentation strategy for your data. Cropping is an effective way to use large, high-resolution, images - such as from drones - at a wide range of scales. We suggest trying only crops first, before adding padding.
# Configuration for zoom/scale augmentations
config_args = {
"train": {
"augmentations": [
# Optional: occasionally "zoom out"
"RandomPadTo": {"pad_range": (0, 50), "p": 0.2},
# Crop at different scales while preserving objects
"RandomResizedCrop": {"size": (800, 800), "scale": (0.5, 1.0), "p": 0.3},
# Basic data augmentation
"HorizontalFlip": {"p": 0.5}
]
}
}
from deepforest import main
model = main.deepforest(config_args=config_args)
Custom Transformations#
For complete control over augmentations, you can still provide custom transforms. You can write your own kornia pipeline and provide an AugmentationSequential container. DeepForest will pass samples to your transform pipeline in a specific order, so you should set the following data keys:
import kornia.augmentation as K
from kornia.constants import DataKey
from deepforest import main
data_keys=[DataKey.IMAGE, DataKey.BBOX_XYXY]
# Set up your transform pipeline:
transform = K.AugmentationSequential(K.RandomRGBShift(), data_keys=data_keys)
model = main.deepforest(transforms=transform)
You may pass any function which takes an image and target (bboxes in xyxy format) tensors as arguments. It must return an image and target tensor in the same format. DeepForest will handle box filtering, as kornia does not provide this functionality, so your transform pipeline should also not drop targets that may have been moved outside the image bounds after a geometric transformation.
def transform(image: torch.Tensor, targets: torch.Tensor) -> tuple(torch.Tensor, torch.Tensor):
return image, targets
How do I make training faster?
While it is impossible to anticipate the setup for all users, there are a few guidelines. First, a GPU-enabled processor is key. Training on a CPU can be done, but it will take much longer (100x) and is probably only done if needed. Using Google Colab can be beneficial but prone to errors. Once on the GPU, the configuration includes a “workers” argument. This connects to PyTorch’s dataloader. As the number of workers increases, data is fed to the GPU in parallel. Increase the worker argument slowly, we have found that the optimal number of workers varies by system.
m.config.workers = 5
It is not foolproof, and occasionally 0 workers, in which data loading is run on the main thread, is optimal : https://stackoverflow.com/questions/73331758/can-ideal-num-workers-for-a-large-dataset-in-pytorch-be-0.
For large training runs, setting preload_images to True can be helpful.
m.configpreload_images = True
This will load all data into GPU memory once, at the beginning of the run. This is great, but it requires you to have enough memory space to do so. Similarly, increasing the batch size can speed up training. Like both of the options above, we have seen examples where performance (and accuracy) improves and decreases depending on batch size. Track experiment results carefully when altering batch size, since it directly effects the speed of learning.
m.config.batch_size = 10
Remember to call m.create_trainer() after updating the config dictionary.
Avoiding Weakly referenced objects errors#
On some devices and systems we have found an error referencing the model.trainer object that was created in m.create_trainer(). We welcome a reproducible issue to address this error as it appears highly variable and relates to upstream issues. It appears more common on google colab and github actions.
In most cases, this error appears when running multiple calls to model.predict or model.train. We believe this occurs because garbage collection has deleted the model.trainer object see: https://github.com/Lightning-AI/lightning/issues/12233 https://github.com/weecology/DeepForest/issues/338
If you run into this error, users (e.g https://github.com/weecology/DeepForest/issues/443), have found that creating the trainer object within the loop can resolve this issue.
for tile in tiles_to_predict:
m.create_trainer()
m.predict_tile(tile)
Usually creating this object does not cost too much computational time.
Training across multiple nodes on a HPC system#
We have heard that this error can appear when trying to deep copy the pytorch lightning module. The trainer object is not pickleable. For example, on multi-gpu environments when trying to scale the deepforest model the entire module is copied leading to this error. Setting the trainer object to None and directly using the pytorch object is a reasonable workaround.
Replace
m = main.deepforest()
m.create_trainer()
m.trainer.fit(m)
with
m.trainer = None
from pytorch_lightning import Trainer
trainer = Trainer(
accelerator="gpu",
strategy="ddp",
devices=model.config.devices,
enable_checkpointing=False,
max_epochs=model.config.train.epochs,
logger=comet_logger
)
trainer.fit(m)
The added benefits of this is more control over the trainer object. The downside is that it doesn’t align with the .config pattern where a user now has to look into the config to create the trainer. We are open to changing this to be the default pattern in the future and welcome input from users.
Visualization during training#
Visualizing images during training can be valuable to spot augmentation that isn’t working as you expected, label issues and to see if the model is learning anything. To make this easy, we provide a Lightning callback that can be used with the trainer: deepforest.callbacks.ImagesCallback. You need to provide a directory path where the images will be saved, which can be a temporary path if you don’t want to keep the images. To use, create the callback object and pass it to create_trainer along with any other callbacks you need.
from pathlib import Path
import tempfile
from pytorch_lightning.loggers import CSVLogger
from deepforest import callbacks
logger = CSVLogger(save_dir="./logs")
# You can access the log directory from other loggers you've set up, to keep everything in the same place.
# the log_dir attribute is the resolved path that includes name and version number.
im_callback = callbacks.ImagesCallback(save_dir=Path(logger.log_dir) / "images", every_n_epochs=2)
m.create_trainer(callbacks=[im_callback], logger=logger)
The callback will, by default, log images to disk. When training starts, it will save images for the training and validation dataset (if available). Then at a user-specified interval (every_n_epochs), predictions will be logged with ground truth. If you have Comet or Tensorboard loggers (loggers which accept add_image or log_image) then the callback will attempt to log to those. Due to auto-discovery behavior with Comet, the callback will preferentially log to Tensorboard if present, to avoid images being pushed to Comet twice. To adjust the number of samples saved, modify dataset_samples and prediction_samples (set to 0 to disable).
If you don’t want to keep images on disk, for example if you’re using a cloud-based logger like Comet, you can pass a temporary directory to the callback.
with tempfile.TemporaryDirectory() as tmpdir:
im_callback = callbacks.ImagesCallback(save_dir=tmpdir, every_n_epochs=2)
m.create_trainer(callbacks=[im_callback], logger=logger)
m.trainer.fit(m)
Training via command line#
We provide a basic script to trigger a training run via CLI. This script is installed as part of the standard DeepForest installation is called deepforest train. We use Hydra for configuration management and you can pass configuration parameters as command line arguments as follows:
Note
If you are using uv to manage your Python environment, remember to prefix these commands with uv run, for example: uv run deepforest predict.
deepforest train batch_size=8 train.csv_file=your_labels.csv train.root_dir=some/path
Under the hood, this sets up a DeepForest model, creates a trainer and runs fit. You can have a look at the script in src/deepforest/scripts/train.py to see exactly what’s being run. However for most users, configuring the dataset paths (train.csv_file and train.root_dir) and perhaps modifying batch_size should be sufficient to start with. By setting up your own configuration or passing arguments via command line, you can train models without ever writing a python script.
The tool includes a number of convenience features that we commonly need: logging, checkpointing, debug predictions and the option to monitor via Tensorboard (local) or Comet ML (cloud). You can resume training by passing the flag --resume with the path to a checkpoint created during training. Logs are saved to your config.log_root, which you can set to wherever is convenient. Experiments will then be saved in separate subfolders, versioned by timestamp if necessary.
If you want to use Comet, pass --comet and the experiment will automatically log to the environment variables COMET_PROJECT and COMET_WORKSPACE (run comet login in your environment first, further docs here). With this option enabled, the log folder will be given the same name as the experiment, which can either be set by you (pass --experiment-name) or auto-generated by Comet. You can also pass any number of --tags which will be added to the Comet experiment. The experiment ID is stored in the metadata for each run; if you resume interrupted training, metrics will be pushed to the existing experiment automatically.
The log directory structure depends on which flags you pass:
| Flags | Log structure |
|---|---|
| (none) | {log_root}/{timestamp}/ |
--experiment-name my-run |
{log_root}/my-run/{timestamp}/ |
--comet |
{log_root}/{comet_auto_name}/ |
--comet --experiment-name my-run |
{log_root}/my-run/{timestamp}/ |
When --experiment-name is set, each run gets a unique timestamp subdirectory (e.g. 20260212_153042), so repeated runs with the same name won’t collide. Without --experiment-name, Comet’s auto-generated name (e.g. azure-capybara-42) is used directly.
This is an example of a log directory. The checkpoints folder contains both training checkpoints (top-1 and last) and HuggingFace compatible weights which can be pushed to the hub. images contains predictions (per epoch), train and validation samples which are created at the beginning of training. metrics.csv and hparams.yaml are generated by Lightning and contain the configuration state when training was started.
tree pretrain/late_meadowlark_5698
├── checkpoints
│ ├── hf_weights
│ │ ├── config.json
│ │ ├── model.safetensors
│ │ └── README.md
│ ├── last.ckpt
│ ├── retinanet-epoch:07-map_50:0.16.ckpt
├── hparams.yaml
├── images
│ ├── predictions
│ │ ├── 2018_TEAK_3_323000_4098000_image_691_11742.json
│ │ ├── 2018_TEAK_3_323000_4098000_image_691_11742.png
│ │ ├── 2018_TEAK_3_323000_4098000_image_691_13699.json
│ │ ├── 2018_TEAK_3_323000_4098000_image_691_13699.png
│ │ ├── 2018_TEAK_3_323000_4098000_image_691_23484.json
│ │ ├── 2018_TEAK_3_323000_4098000_image_691_23484.png
...
│ ├── train_sample
│ │ ├── 2019_HOPB_3_719000_4705000_image_tile_97.png
│ │ ├── 2019_SERC_4_369000_4304000_image_tile_2.png
│ │ ├── 2019_SOAP_4_301000_4106000_image_tile_61.png
│ │ ├── 2019_WREF_3_577000_5072000_image_tile_15.png
│ │ └── 2019_WREF_3_581000_5079000_image_tile_82.png
│ └── validation_sample
│ ├── BLAN_009_2019.png
│ ├── JERC_048_2018.png
│ ├── MLBS_062_2018.png
│ ├── SJER_009_2018.png
│ └── SOAP_056_2019.png
├── metrics.csv
For throwaway experiments, generated names are convenient, but for science results you might want to pick something more easily interpretable like retinanet-my_dataset-fold-4. In this case, a timestamp will be added in case you run the experiment multiple times.
To view Tensorboard logs (--tensorboard), call uv run tensorboard --logdir <log_root>. Tensorboard is a little less polished than Comet, but it’s completely free and supports all the basic functionality you need for tracking model training runs. DeepForest’s image logger will push images to Tensorboard as well. You can pass both flags and log to both Tensorboard and Comet simultaneously. One reason to do this is to distribute your training logs on HuggingFace.
To check what configuration options are available, run:
deepforest config
which will show you where Hydra is looking and what the current (default) config is. You can then pick which parameters you want to override with the syntax <key>=<value>. For nested cofiguration, like the train option we passed above, separate levels of nesting with periods (.), such as train.scheduler.params.gamma=0.1.
For more complex training requirements, such as adding additional transforms or other aspects which are not directly modifiable via the config file, we suggest using the script as a reference.
To override settings using your own configuration file, we recommend copying the default configuration and place it in your working/training directory. This is the preferred method for repeatable training because it will provide you with a full record of the configuration of your training run. Then run:
deepforest --config-dir /your/config/folder --config-name config_file_name train
Note you don’t need to pass the yaml extension. This method uses Hydra’s standard flags. Otherwise you can save a config file using any valid subset of the options (for example just the CSV location and root directory) and Hydra will overlay those on top of the default config. The CLI script will first load the default configuration and then load /your/config/folder/config_file_name.yaml.